Kurs: Podstawy Robotyki – Czujnik ultradźwiękowy. Wprowadzenie
W opracowaniu tego artykułu wykorzystaliśmy materiały przygotowane przez nas dla robotów modularnych i dostosowane w formie kursu robotyki do serii robotów Abilix Krypton.
W poszczególnych robotach tłumaczenia nazw i kolory poszczególnych bloków mogą się różnić. Zasada działania i programowania w języku Scratch pozostaje jednak podobna.
Czujnik ultradźwiękowy, jako czujnik odległości jest ważnym elementem systemu wizyjnego robota. Mierzy on odległość od znajdującej się przed nim przeszkody wykorzystując w tym celu falę dźwiękową.
Czujnik generuje falę ultradźwiękową, to znaczy dźwięk o częstotliwości powyżej 20 kHz, niesłyszalny dla człowieka. Wyemitowana fala dźwiękowa odbija się od napotkanej przeszkody i wraca do czujnika jako fala odbita — echo. Czas upływający pomiędzy nadaniem sygnału i odebraniem przez czujnik echa tego sygnału zależy od tego w jakiej odległości od czujnika znajduje się przeszkoda.
Ponieważ prędkość dźwięku w powietrzu jest stała, zmierzony przez czujnik ultradźwiękowy czas powrotu sygnału pozwala na obliczenie w jakiej odległości od czujnika sygnał dźwiękowy napotkał przeszkodę.

Większość czujników ultradźwiękowych to dwa połączone ze sobą urządzenia: nadajnik i odbiornik.
• Nadajnik (emiter) generuje falę ultradźwiękową o wysokiej częstotliwości.
• Odbiornik nasłuchuje echa powstałego w wyniku odbicia się fali dźwiękowej od napotkanej przeszkody.
Tryby pracy czujnika ultradźwiękowego:
Czujnik ultradźwiękowy w robocie Krypton może pracować równocześnie w dwóch trybach:
• wykrywania przeszkody
• mierzenia odległości.
Tryb wykrywanie przeszkody jest funkcją logiczną zwracającą wartość „1” kiedy czujnik wykryje obiekt w odległości między 5 a 20cm, lub wartość logiczną „0” kiedy w określonym przedziale odległości czujnik nie napotka przeszkody.
Tryb mierzenie odległości jest funkcją zwracającą zmierzoną odległość od przeszkody w przedziale od 5cm do 1,5m. Wartość zwracana przez czujnik jest zawsze podawana w milimetrach(!).
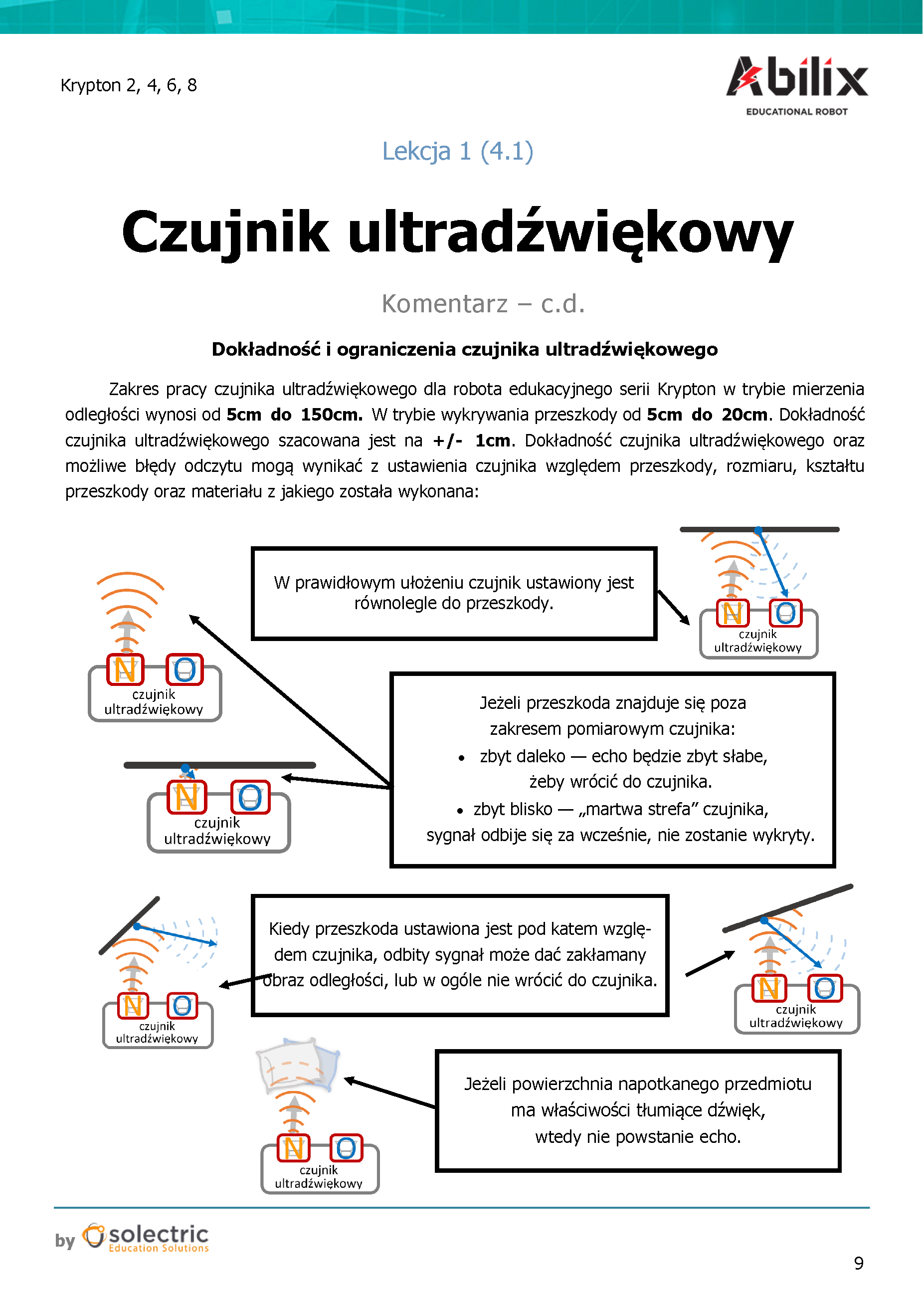
Dokładność i ograniczenia czujnika ultradźwiękowego
Zakres pracy czujnika ultradźwiękowego dla robota edukacyjnego serii Krypton w trybie mierzenia odległości wynosi od 5cm do 150cm. W trybie wykrywania przeszkody od 5cm do 20cm. Dokładność czujnika ultradźwiękowego szacowana jest na +/- 1cm. Dokładność czujnika ultradźwiękowego oraz możliwe błędy odczytu mogą wynikać z ustawienia czujnika względem przeszkody, rozmiaru, kształtu przeszkody oraz materiału z jakiego została wykonana: