Line follower – jak to działa?
Ostatnio pracujemy z uczniami nad programem który sprawi, że robot będzie poruszał się po linii… Jak to działa? Otóż właśnie to poruszanie się po linii jest tym, co najbardziej zaskoczyło uczniów.
Otóż, na samym początku możemy założyć, że poruszanie się po linii to własnie jazda po kolorze czarnym (zazwyczaj), wydzielonym wysokim kontrastem z obu stron. Nie do końca… Zresztą, gdyby tak było w jaki sposób robot wiedziałby czy odbił od linii w lewo, czy w prawo?
Czujnik koloru w tym programie ustawiamy na pomiar światła odbitego. Mierzymy odbicie światła na kolorze obok linii (np. biały – ok. 65-90 – zależnie od światła) oraz linii, zazwyczaj czarnej (ok. 5-15).
Linią, po której chcemy się poruszać jest tak naprawdę linia graniczna – czujnik czyta odbicie z fragmentu linii czarnej i fragmentu białej. Idealne ustawienie pożądanego zakresu jest bardzo istotne. Dajmy sobie np. zakres 20 – 40. Poniżej 20 jest zbytnio na linii czarnej, powyżej 40 jest na linii białej. Warto tu zwrócić uwagę na fakt, po której stronie linii nasz robot się poruszał. Jeżeli po lewej, to najeżdża na czarną linię w prawo (powinien więc odbić w lewo), jeżeli po prawej, to czarną linię ma po lewej (powinien więc odbić w prawo).
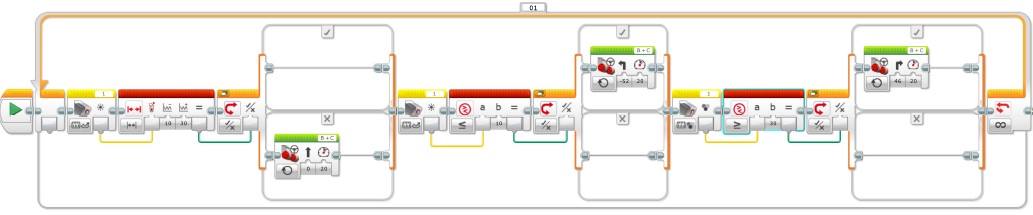
Program (dla poruszania się po prawej stronie linii):
- Zmierz poziom odbicia światła
- Jeżeli jest w wymaganym przez nas zakresie – jedź prosto
- Jeżeli nie jest przejdź do 2 warunku
- Jeżeli odbicie światła jest mniejsze niż próg zakresu – oznacza to że jesteś zbytnio na czarnej linii, tzn za bardzo po lewej – skręcaj lekko w prawo aż czujnik osiągnie wymagany zakres.
- Jeżeli odbicie światła nie jest mniejsze niż próg zakresu (i nie mieści się w zakresie) przejdź do warunku 3.
- Jeżeli odbicie światła jest większe niż próg zakresu – jesteś na białej linii, za bardzo po prawej stronie – skręcaj lekko w lewo aż czujnik osiągnie wymagany zakres.
Cały program powtarzaj w pętli.
Jest to jeden z najprostszych line follower’ów. Nie zawsze jest on skuteczny przy ostrych zakrętach, nie zwraca uwagi na przerwania i skrzyżowania. O tym wkrótce…